Environmental noise can have significantly adverse effects on our everyday lives, including interference with communication, sleep disturbance, learning acquisition, annoyance responses, performance effects as well as our health through cardiovascular and psycho-physiological effects. Product designers and engineers at the world’s most innovative and successful companies have recognised this fact, and incorporate effective noise mitigation elements into their product design process.
When we mostly think of noise harshness, we tend to think “loud and up-close”. Doubling the distance between yourself and the source of a noise will effectively cut the intensity of the sound by 6 dB; i.e. the noise will only sound about 25% as loud. However, annoyance is the most widespread problem caused by environmental noise and occurs when we are constantly exposed to a noise source, regardless of the intensity. Annoyance reflects the way that noise affects daily activities. People’s social circumstances, their culture and the environment in which they live can all determine the degree of perceived annoyance for a given noise level.
Aeroacoustics techniques in engineering were pioneered by engineers investigating noise generation and acoustic signatures in military and defence applications, particularly for detection and survivability. In civil industries, aeroacoustic noise is increasingly a hot topic for engineers working in ground and air transport, industrial machinery, concert hall acoustics, environmental conditions, as well as complex fluid-structure interactions (i.e. vibrations). Our increased awareness of the adverse effects of noise annoyance has led to aero-acoustically generated noise (aka flow generated noise) being identified as a critical design variable in modern engineering design. This in turn has led to an increase in the research efforts aimed at numerical prediction of aerodynamic noise, often dubbed Computational Aero-Acoustics (CAA).
Computational Aeroacoustics (CAA)
CAA is capable, in principle, of modelling both the aerodynamic sound source and the propagation to the far field. Fluid flow at the source and sound wave propagation both fall under fluid phenomena, thus they are solved using the CFD governing equations. The principle constraint in direct CAA is that the computing resources required to model the entire flow domain (i.e. from the source to the receiver) often makes this approach impractical. Thus, practical problems solved using CAA are therefore more likely to be when:
- Frequency range is between 20 to 20000 Hz. Acoustic timescales are often orders of magnitude greater than turbulence time scales. Hence, simulation needs to be run for an extended period of time, i.e. large number of time steps.
- Domain can extend from sound source to the receiver. Therefore, this approach is currently not practical for far-field sound prediction such as aircraft noise being heard on the ground.
- Magnitude of acoustic pressure is much less than the hydrodynamic pressure. Therefore, CAA requires the use of very high order discretization schemes to propagate sound over large distances.
You can see that the advantage of CAA is that it is simple to implement, however it does require large meshes and extensive transient simulations. Proper resolution of the tonal and broadband noise sources also dictates the use of advanced scale-resolving simulations for turbulence effects. CAA can also account for flow-sound coupling, i.e. cases where the sound has a backward effect on the flow.
For these reasons, direct CAA is generally not applied to most industrial engineering problems. Fortunately, there are alternative methods by which a reasonable solution of the sound propagation may be obtained with today’s modern hardware:
Broadband noise models
We all know that unsteady CFD simulations are time consuming, but many do not know that steady RANS results can still provide a great deal of useful & acoustically-relevant information (including mean velocity components/pressure, turbulent kinetic energy, turbulent dissipation, etc.). This information can be used to estimate turbulent or broadband sound, which can in turn be used to identify the primary sources of noise in our CFD domain (such as an automotive A-pillar and wing mirrors). ANSYS CFD tools offer a number of broadband sound models which only require steady RANS results to provide a useful quantification of the noise source levels, allowing designers and engineers to quickly rank their designs (by acoustics performance) and eliminate geometry that acts as large potential sources of noise.
Sound Source-Propagation Methods (SSPM)
Remember that sound generation and propagation are independent phenomena in most cases. They happen at vastly different scales, i.e. Flow pressure ~ kPa; acoustic pressure ~ mPa. Turbulence length scales ~ µm; acoustic wavelengths ~ m. Turbulence time scales ~ µs; acoustic time scales ~ ms.
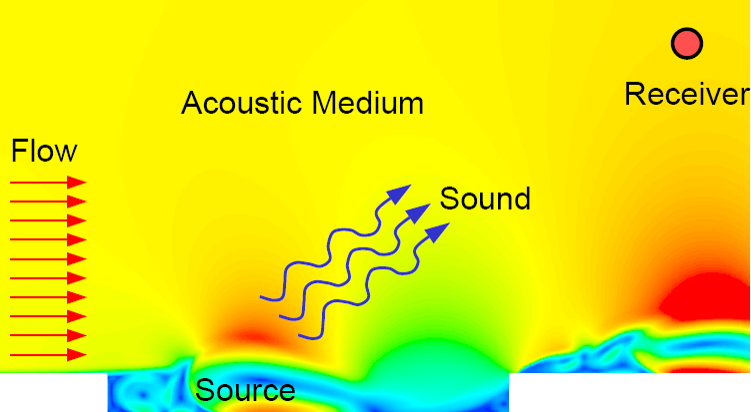
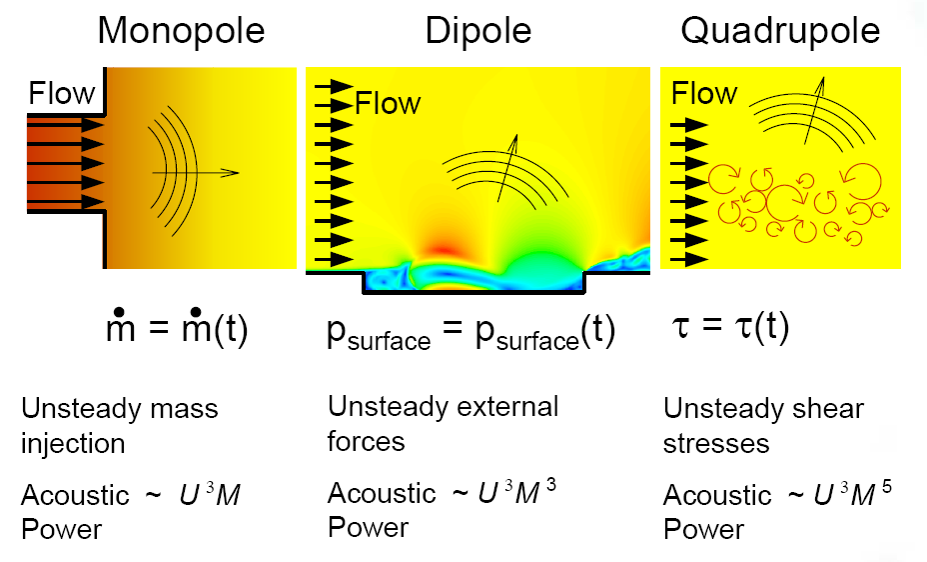
Therefore, we can consider the problem domain in two distinct layers: The flow field (governs sound source and generation through Navier-Stokes equations) and the acoustic field (governs sound propagation through the wave equation). This provides us with the opportunity to reduce our computational efforts significantly which opens up a wider variety of applications. Connection of the two segregated components (i.e. source and propagation) is achieved using an acoustic analogy. Generally the tensor term in the acoustic analogy represents the sound source calculated by the CFD simulation. Once CFD provides sound source information, the problem reduces to solving for sound propagation.

ANSYS Fluent provides features to compute sound propagation using the Ffowcks-Williams and Hawkins (FHW) boundary element method (BEM), meaning it relies solely on unsteady pressure information at the domain boundary. Since this approach is much less computationally expensive, it provides considerable benefits to aerodynamic and hydrodynamic far-field noise scenarios as the CFD domain is only required to encompass the object generating the noise source (to calculate unsteady pressure fluctuations). ANSYS Fluent additionally offers coupling to other BEM/FEM acoustics tools, if real geometry effects, acoustic impedance or vibrating structures are to be considered.
Acoustics and Aeroacoustics training – Melbourne, August 10-11, 2015

This advanced training will provide you with everything you need to confidently tackle acoustics and aeroacoustics problems, including:
- A background on the theory of acoustics and aeroacoustics
- Details on other important physics such as transient turbulence modelling
- Details of the different types of FEA based acoustic simulations, including modal, harmonic, transient and vibro-acoustic analysis
- Examine noise sources, perforated material and far field processing
- Details of CFD-based aeroacoustics simulation techniques including direct CAA methods, FWH (segregated source/propagation methods, boundary element methods) and stochastic noise generation / broadband noise models
- Overview of coupling Mechanical with CFD tools for aero-vibro-acoustics
SOURCE : COMPUTATIONALFLUIDDYNAMICS.COM